
НТУ “ХПИ”
КАФЕДРА АВТОМАТИЗИРОВАННЫХ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ
Компания National Instruments (NI) – лидер в области разработки и производства аппаратных и программных средств автоматизированного измерения, диагностики, контроля и моделирования. NI является разработчиком виртуальных приборов – революционной концепции, которая изменила подход и методологию измерения и разработки систем автоматизации.
Преимущества лаборатории компании NI:
• использование многофункциональной лабораторной станции NI ELVIS II+, которая является базовым решением для применения в практических обучающих курсах по различным дисциплинам;
• возможность добавления практических курсов по новым дисциплинам за счет приобретения новых плат;
• возможность разработки и моделирования интегральных схем и печатных плат;
• интеграция с САПР MultiSim и UltiBoard;
Платформа проектирования и прототипирования ELVIS II+ (National Instruments Electronic Laboratory Virtual Instrumentation Suite system) используется для реализации образовательных задач по системам управления, схемотехнике, телекоммуникации и встроенным микроконтроллерам.
Образовательная платформа NI ELVIS II + реализована на основе графической среды NI LabVIEW, Multisim. В комплект станции должно входить программное обеспечение Labview и Circuit Design Suite.
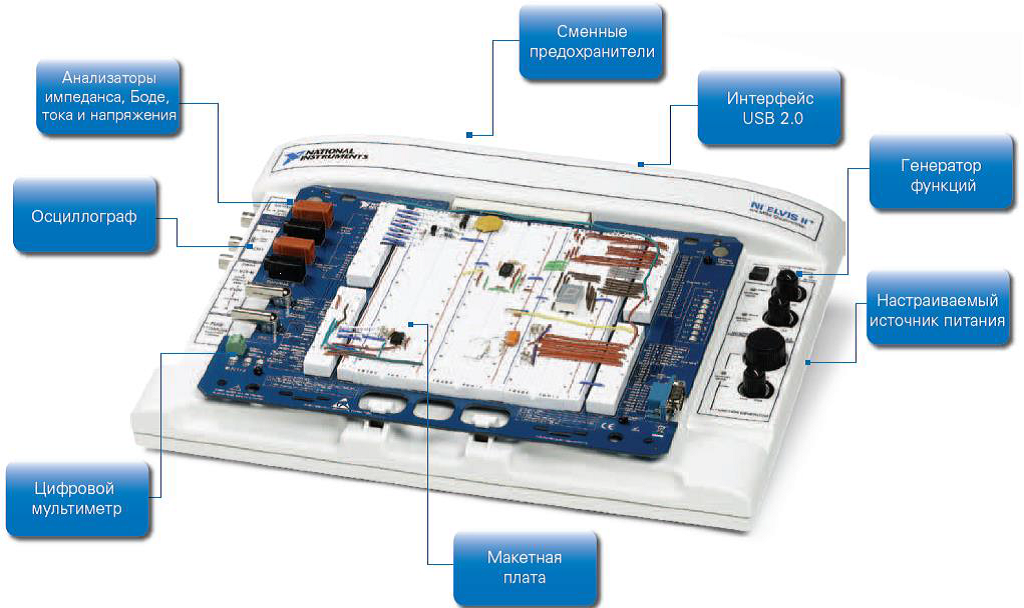
Платформа содержит 12 встроенных инструментов для интерактивного и практического обучения:
• Осциллограф
• Функциональный генератор
• Генератор сигналов произвольной формы
• Цифровой мультиметр
• Источники питания
• Анализатор спектра
• Анализатор импеданса
• Анализатор АЧХ/ФЧХ
• Анализатор ВАХ двухпроводных линий
• Анализатор ВАХ трехпроводных линий
• Генератор цифровых сигналов
• Анализатор цифровых сигналов
Лабораторная станция имеет следующие характеристики:
• Аналоговые входы, каналов 8 диф/16 общ., АЦП 16 бит, частота дискретизации 1,25МГц, кол-во входных диапазонов 7, аналоговый запуск
• Каналы осциллографа – 2, скорость оцифровки 100 MS/s, память 16384 точек на канал
• Аналоговые выходы, каналов 2, ЦАП 16 бит, частота дискретизации 2МГц
• Цифровые входы/выходы, каналов 24
• Пользовательские таймеры-счетчики, каналов 2, разрядность 32 бита.
• Изолированный мультиметр, измерение: AC/DC ток, напряжение, сопротивление, диод, емкость, индуктивность; точность 5,5 знаков. Входной диапазон 60 В, 3 А.
• Функциональный генератор, каналов 1, формы сигналов – синусоидальный, треугольный, прямоугольный.
• Регулируемые источники питания, каналов 2, диапазон +-12 В.
• Интерфейс подключения USB 2.0.
NI ELVIS II + имеет открытую архитектуру, что существенно упрощает использование оборудования ведущих поставщиков технических средств обучения. NI ELVIS II + обеспечивает возможность использования оборудования следующих производителей:
– Проектирование систем управления с использованием учебных инструментов Quanser: DC motor Quanser QNET, inverted pendulum Quanser QNET;
– Circuitry – платформа для изучения электроники, интегрирована с Multisim;
– Embedded Systems / DSP-процессор of Analog Devices ADSP;
– Sensors – адаптеры для сенсоров компании Vernier для NI ELVIS.
Лабораторный практикум поставляется с готовым программным и методическим обеспечением для проведения лабораторных работ. На оборудовании компании National Instruments на кафедре реализованы следующие лаборатории.
Лаборатория «Система управления двигателем постоянного тока» – Quanser QNET DC Motor Control Board for NI ELVIS
Оборудование лаборатории позволяет студентам изучать и самостоятельно разрабатывать системы автоматического управления и регулирования. В процессе работы студенты получают практические навыки создания, тестирования и отладки систем с реальными объектами управления.
Лабораторные работы посвящены основным темам теории управления, в том числе статическим и динамическим свойствам систем регулирования, передаточным функциям и частотным характеристикам, теории электропривода и основам синтеза систем управления.

Список лабораторных работ:
• Аналогово-цифровое преобразование (симуляция);
• Аналого-цифровое преобразование сигналов;
• Цифроаналоговое преобразование (симуляция);
• Цифроаналоговое преобразование сигналов;
• Методы дискретизации и анализ устойчивости;
• Методы дискретизации и переходная характеристика;
• Системы первого порядка: Переходная характеристика;
• Системы первого порядка: Частотная характеристика;
• Передемпфированные системы второго порядка: Переходная характеристика;
• Передемпфированные системы второго порядка: Частотная характеристика;
• Недодемпфированные системы второго порядка: Переходная характеристика;
• Недодемпфированные системы второго порядка: Частотная характеристика;
• Недемпфированные системы второго порядка: Переходная характеристика;
• Недемпфированные системы второго порядка: Частотная характеристика;
• Проектирование передаточной функции;
• Экспериментальное определение внутреннего сопротивления;
• Экспериментальное определение противоЭДС;
• Экспериментальная проверка модели;
• Экспериментальное моделирование с использованием переходной характеристики;
• Экспериментальное моделирование с использованием частотной характеристики;
• Дискретный эквивалент передаточной функции;
• Моделирование, реализация пропорционального регулятора скорости;
• Моделирование, реализация, исследование, верификация пропорционально-интегрального регулятора скорости;
• Цифровая эмуляция пропорционально-интегрального регулятора скорости;
• Исследование, реализация пропорционального регулятора положения;
• Моделирование, исследование пропорционально-дифференциального регулятора положения;
• Цифровая эмуляция пропорционально-дифференциального регулятора положения;
• Исследование, реализация пропорционально-интегрального регулятора с взвешиванием по уставке;
• Ограничение интегральной составляющей;
• Моделирование, исследование подавления возмущений крутящего момента;
• Проектирование, реализация регулятора с подавлением возмущений крутящего момента;
• Экспериментальная оценка задержки, обусловленной дискретизацией;
• Экспериментальное определение запаса устойчивости;
• Экспериментальное определение запаса по времени задержки;
• Исследование чувствительности и параметров робастного регулирования;
• Реализация робастного регулирования;
• Создание фазового компенсатора в LabVIEW;
• Разработка, моделирование и реализация фазового компенсатора;
• Дискретная эмуляция фазового компенсатора;
• Моделирование пропорционально-интегрального регулятора Циглера-Николса;
• Реализация пропорционально-интегрального регулятора по методу Циглера-Николса;
• Дискретная эмуляция пропорционально-интегрального регулятора Циглера Николса;
• Разработка прямого цифрового регулятора методом Ragazzini;
• Моделирование прямого цифрового регулятора Ragazzini;
• Реализация прямого цифрового регулятора Ragazzini;
• Разработка и реализация прямого дискретного пропорционально-интегрального регулятора;
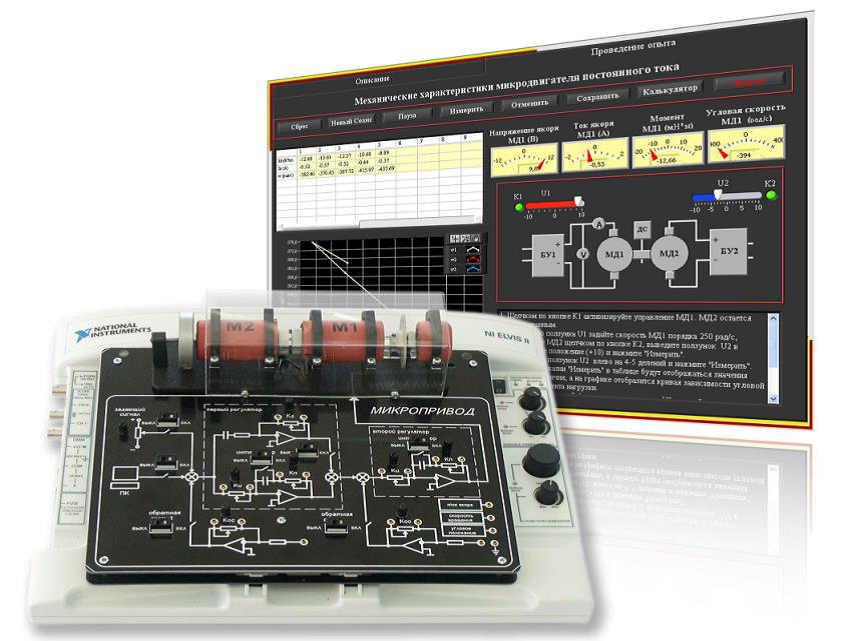
Лаборатория «Микроприводы» – Micromotors and Automatic Motor Control Board
Все лабораторные работы проводятся на плате с установленными на ней микродвигателями постоянного тока. Студенты имеют возможность изучать механические, статические и динамические характеристики электродвигателей в открытой системе с программно-управляемым блоком питания.
Список лабораторных работ:
1. Статические параметры системы:
• Определение активного сопротивления обмотки якоря микродвигателя
• Определение коэффициента электромеханического преобразования микродвигателя
• Снятие механических характеристик микродвигателя постоянного тока
• Снятие рабочих характеристик микродвигателя постоянного тока
• Снятие статических механических характеристик одноконтурной САУ скоростью, с различными регуляторами
2. Динамические параметры системы:
• Определение динамических характеристик разомкнутой САУ скоростью ДПТ
3. Динамические системы с различными регуляторами (Программное исполнение):
• Исследование динамических характеристик одноконтурной САУ скоростью ДПТ
• Исследование динамических характеристик двухконтурной САУ скоростью ДПТ
• Исследование динамических характеристик одноконтурной САУ угловым положением ротора ДПТ
• Исследование динамических характеристик двухконтурной САУ угловым положением ротора ДПТ
4. Динамические системы с различными регуляторами (Аппаратное исполнение):
• Исследование динамических характеристик одноконтурной САУ скоростью ДПТ
• Исследование динамических характеристик двухконтурной САУ скоростью ДПТ
• Исследование динамических характеристик одноконтурной САУ угловым положением ротора ДПТ
• Исследование динамических характеристик двухконтурной САУ угловым положением ротора ДПТ
Лаборатория метрологии – Quanser QNET Mechatronics Sensors Board
Лабораторный практикум охватывает изучение принципов калибровки датчиков, обработки и анализа полученных с датчиков сигналов. Лаборатория комплектуется различными датчиками, установленными на макетной плате: потенциометр, пленочный пьезодатчик, тензодатчик, термистор, энкодер, оптический датчик, инфракрасный датчик расстояния, ультразвуковой датчик,
магнитный датчик, датчик давления.

Плата обладает следующими техническими характеристиками:
• потенциометр (300 гр, линейность ±5);
• инфракрасный датчик (диапазон измеряемых расстояний 20…150 см);
• датчик давления (0…207 кПа, 0,0193 В/кПа, 3мВ);
• ультразвуковой датчик (обнаружение объектов 0…6.45м, диапазон
ультразвука 0,15…6,45м, разрешение 2,54см, 20Гц);
• пленочный пьезодатчик (16В/g, резонансная частота 40Гц, 3dB частота
20Гц, расположение массы от края 1,40см).
Лаборатория проектирования цифровых устройств и
программирования ПЛИС – NI Digital Electronics FPGA Board
Лаборатория предназначена для изучения процесса проектирования цифровых устройств. Пользователи могут создавать цифровые блоки в Multisim, а затем воплощать их на макетной плате. Плата имеет микросхему ПЛИС Xilinx Spartan-3E.

Практикум включает 9 лабораторных работ по изучению функционирования и программированию ПЛИС. Программирование ПЛИС может осуществляется как стандартными средствами Xilinx (Xilinx ISE Tools), с помощью языков программирования таких как Verilog или VHDL, так и на
«верхнем уровне» в среде графического программирования LabVIEW FPGA. Работа c использованием пакета Xilinx iMPACT позволяет создавать логическое описание системы на языках Verilog/хHDL, файл разводки вводов/выводов ПЛИС (.ucf), использовать утилиту для работы с дисплеем и утилиту для создания блочной памяти. Таким образом, имеется возможность
создавать приложения для запуска на аппаратной платформе ПЛИС, а также подключать к ее линиям ввода/вывода периферийные устройства: линейки светодиодов, DIP-переключатели, кнопки включения, семисегментные индикаторы, дисплеи, энкодеры и т. д.
Список лабораторных работ:
• Принципы работы ПЛИС. Основы функционирования логического
вентиля.
• Создание делителя частоты.
• Создание реальной цепи по модели, которая отслеживает нажатие 8
кнопок и выводит номер нажатой кнопки на 7-ми сегментный дисплей.
• Создание схемы передачи данных, которая обрабатывает входные
данные и подсвечивает один из светодиодов, если число на входе делится на 3.
• Изучение мультиплексора, демультиплексора.
• Изучение программируемого счетчика.
• Создание детектора последовательностей.
• Создание „конечного автомата“ на базе счетчиков.
• Моделирование ПЗУ используя утилиту Xilinx ISE CORE Generator.
Мобильный робот на платформе для преподавания и исследования в робототехнике – Robotics Starter Kit (DaNI) for Education (A Mobile Robot Platform for Robotics Teaching and Research)
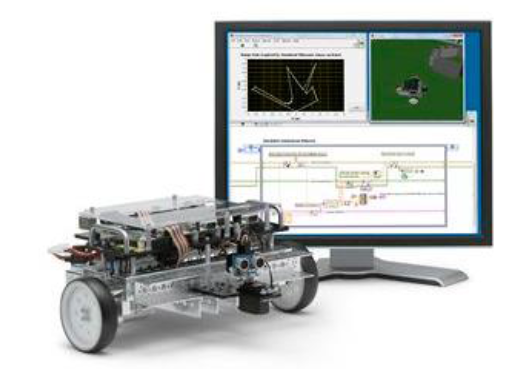 NI LabVIEW Robotics Starter Kit, известный как DaNI, является промышленным изделием, роботизированной платформой, предназначенной для изучения концепций робототехники и мехатроники или для создания прототипов роботизированных систем. Комплект включает в себя датчики, двигатели, и встроенную плату NI Single-Board RIO для управления. Робот программируется с использованием графической среды разработки LabVIEW.
NI LabVIEW Robotics Starter Kit, известный как DaNI, является промышленным изделием, роботизированной платформой, предназначенной для изучения концепций робототехники и мехатроники или для создания прототипов роботизированных систем. Комплект включает в себя датчики, двигатели, и встроенную плату NI Single-Board RIO для управления. Робот программируется с использованием графической среды разработки LabVIEW.
Состав установки:
• мобильный робот в сборе;
• встроенный контроллер NI sbRIO-9632;
• ультразвуковой датчик, энкодеры, двигатели, аккумулятор и зарядное устройство;
• программное обеспечение для программирования роботов, включая обход препятствий;
• возможность программирования с использованием программных модулей LabVIEW Real-Time and LabVIEW Robotics.